

毫米波防砸雷达分析存在问题和优势
2020-9-27 10:24:15 点击:
近年来,随着人工智能的兴起无人驾驶汽车获得了越来越多的关注,而无人驾驶车辆想要真正上路行驶,最关键的技术在于精确掌握现实中复杂的交通状况,这样一来就必须使用雷达装置。由于毫米波雷达相对于摄像头及激光雷达,其感知特性具有距离远、可靠性高、不受光线及尘埃影响等特点 [1],特别是不会受恶劣天气的影响并且能够全天候工作,因此是无人驾驶技术的最佳选择。
毫米波雷达是利用目标对电磁波的反射来发现并测定目标位置,而充满杂波的外部环境给毫米波雷达感知带来无法避免的虚警问题。为此,本文针对 L3 级自动驾驶样车所配备的 77 GHz 长距毫米波雷达和中距毫米波雷达在感知识别中的主要问题进行了分析并提出了解决对策,为后续毫米波雷达的应用和测试提供参考。
2. 毫米波雷达识别问题解析
2.1 毫米波雷达工作原理
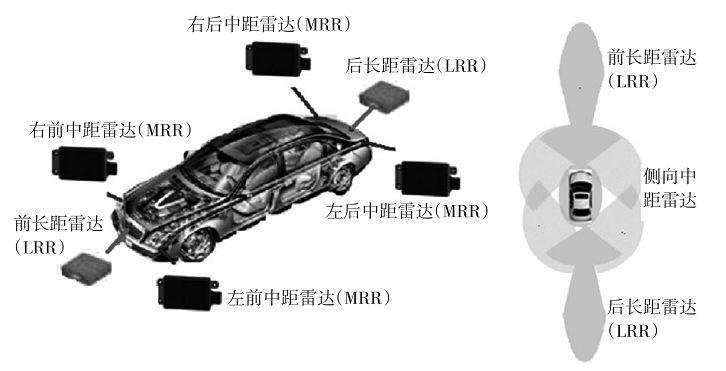
图 1 毫米波雷达系统整车布置示意
L3 级自动驾驶样车车身周围布置了 2 枚长距毫米波雷达和 4 枚中距毫米波雷达,可实现车身 360° 环境感知范围覆盖。毫米波雷达系统整车布置方案及探测范围如图 1 所示。
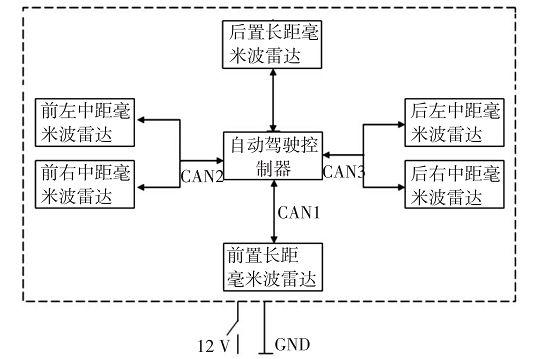
图 2 毫米雷达系统网络架构示意
毫米波雷达通过 CAN 信号与自动驾驶控制器进行交互(图 2),将其感知结果输入至下一级规划控制模块,其输出参数如表 1 和表 2 所列。
表 1 长距毫米波雷达输出参数

表 2 中距毫米波雷达输出参数
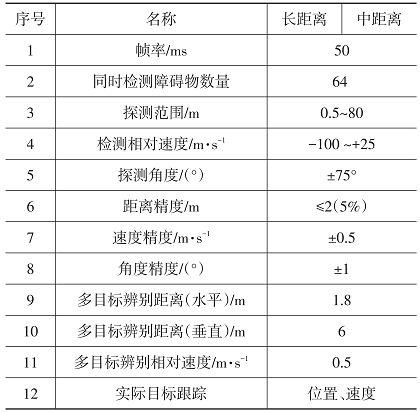
由表 1 和表 2 可知,相对其它传感器(如视觉传感器、激光雷达传感器),毫米波雷达具有速度精度较高、角分辨率相对较低等特点。由于中距雷达、长距雷达的短距模式角度覆盖范围相对更大,其角分辨率进一步下降。
- 上一篇:79g毫米波防砸雷达成功上市欢迎垂询 2020/10/8
- 下一篇:毫米波雷达安装注意事项和相关问题解决方案 2020/9/25
